ublo
bogdan's (micro)blog

bogdan » Platform Engineering in the Agentic Era
11:02 pm on Jul 10, 2026 | read the article | tags: ideas
A note on context: this post reflects patterns I have observed and experienced across technical and organizational work. It is not intended as a description of any single team, project, or individual. The goal is not to assign blame, but to examine what happens when delivery depends increasingly on invisible coordination, personal trust, and informal intervention.
We spent the last decade optimizing the technical substrate. We built internal tools, automated cloud infrastructure, streamlined CI/CD, and simplified deployment pipelines. It worked. And by automating away the mechanical friction of software delivery, we exposed the one underneath it.
As generative models and LLM coding agents make software implementation faster and cheaper, the bottleneck has migrated.
The limiting factor is often no longer whether the code can be written, but whether the human system surrounding it will pay attention, agree, decide, review, and act.
More of our highest-leverage work now applies the same hacking instinct to the organization itself: attention, incentives, trust, and coordination. I do not mean manipulation or political maneuvering.
The Migration of Latency
To understand why our day-to-day feels different, look at a simplified delivery model:
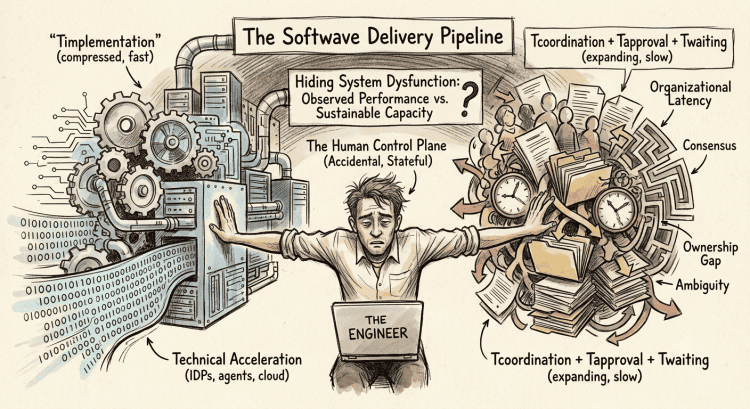
$$T_{delivery} = T_{thinking} + T_{implementation} + T_{coordination} + T_{approval} + T_{waiting}$$
Historically, \(T_{implementation}\) was often one of the dominant costs: infrastructure toil, repeated setup, and raw coding took time.
Today, coding assistants are shrinking the implementation part of that equation, while \(T_{coordination}\), \(T_{approval}\), and \(T_{waiting}\) do not automatically scale with an LLM license. They are bound by human bandwidth.
The paradox of this accelerated era is that individuals become faster while organizations fail to become proportionally faster. As technical execution gets faster, organizational latency takes up a larger share of total delivery time.
From Infrastructure to Coordination Engineering
When the bottleneck moves, the engineering instinct doesn’t change. The medium does. Experienced platform engineers are quietly repurposing their systems thinking from microservices to people.
There is a direct structural analogy between solving technical friction and solving organizational friction:
| Technical Platform Work | Organizational Coordination Work |
|---|---|
| Reduce deployment friction | Reduce consensus friction |
| Build self-service interfaces | Create clear decision paths |
| Remove repetitive toil | Remove repetitive negotiation |
| Improve system observability | Surface hidden disagreement |
| Reduce unnecessary dependencies | Reduce unnecessary stakeholders |
| Cache expensive computation | Cache trust and shared context |
| Design predictable golden paths | Create accepted default approaches |
| Debug distributed software systems | Debug distributed ownership |
The optimization target across both columns remains identical: shorten the feedback loop between hypothesis → action → observation → correction. A slow approval chain and a slow CI pipeline differ in execution, but both make iteration expensive.
We are no longer just mapping API endpoints; we are mapping the undocumented interfaces of our organization. It’s still systems engineering. But the components are human.
The Unplanned Control Plane
In distributed systems, a control plane does not perform the primary workload itself. Instead, it maintains the conditions under which the system can successfully run by configuring routing, reconciling competing states, applying policy, translating intent, and reacting when actual state diverges from desired state.
That is what many of us are now doing inside organizations. We have become the control plane nobody designed.
This is especially true in machine learning platform roles, where problems rarely arrive as clean, bounded tasks. When an internal customer says, “The model cannot deploy,” the root cause is rarely a single broken line of code. It is a tangled knot of IAM roles, cloud quotas, networking policies, and data contracts spanning three different teams.
The architecture of a technical problem and the architecture of an organization rarely align perfectly. Problems cross the boundaries of formal ownership, and someone has to absorb that ambiguity.
Work develops a gravitational pull toward reliability. The organization implicitly learns: “Give it to them. They will figure out what is actually wrong.”
The difference is that while software control planes scale horizontally, human ones break down under load. Worse, the state they maintain – trust, context, informal ownership, half-finished negotiations – often cannot be failed over cleanly to another person.
The Shock Absorber Paradox
This creates a dangerous systemic pattern: we become organizational shock absorbers.
A firefighter responds to visible outages. A “glue person” connects gaps between formal responsibilities. A shock absorber quietly prevents internal organizational turbulence from reaching the outside service boundary.
The organization sees a stable interface: deployments happen, internal customers remain supported, and delivery matches expectations. They do not see the context-switching, the repeated negotiations, or the raw emotional effort required to manufacture momentum for work that would otherwise stall. Sometimes, the “platform” is simply the senior engineer who takes on another on-duty rotation because the alternative is letting the service boundary crack.
This creates a cruel failure signal loop. Successful compensation destroys system observability.
$$\text{Observed Team Performance} = \text{Sustainable Team Capacity} + \text{Invisible Extra Labor}$$
Because that extra labor is highly effective, the organization loses the telemetry that would reveal how fragile the underlying system actually is. Planning, staffing, and expectations are calibrated against a baseline that only exists because we are overextending.
The organization mistakes observed performance for sustainable capacity because the human control plane is hiding the difference. Our competence delays the repair of the very system that is exhausting us.
The Counterfactual Output
The most exhausting coordination work produces no durable artifacts.
Nobody can look at a git log or an executive dashboard and see the escalation that never happened, the project that didn’t stall for three weeks because we chased a dependency, or the architectural disagreement resolved quietly over a private Slack conversation. Its output is entirely counterfactual: it is the failure that did not become visible.
A deployed API gateway or a production inference platform can be demonstrated in a sprint review. The weeks we save through trust-building, context translation, and quiet coordination cannot. Yet, as technical execution gets faster, that invisible work can create more business value than writing more code.
The Reality of the Substrate Shift
As we move deeper into an ecosystem where machines take on more of the mechanical work of software implementation, the senior engineer’s role is splitting.
The machine loop is accelerating while the human loop remains stubbornly slow. Every improvement in execution makes the gap between what we can build and what we can coordinate harder to ignore.
If we find ourselves spending more time routing attention, building trust networks, and manufacturing consensus than writing software, we haven’t stopped engineering. We haven’t graduated, either. We have simply become responsible for a substrate nobody formally assigned us.
But as we navigate this transition, we have to ask ourselves the central system design question:
Are you actually improving the system, or are you just becoming the runtime mechanism by which its dysfunction remains survivable?
bogdan » Stop Searching by Coincidence: Portability and the Storage Decoupling Layer
09:47 pm on Jul 6, 2026 | read the article | tags: medium
Most architecture diagrams are much easier to understand after the system has already been built. You look at the boxes, see an API gateway connected to an embedding model, a vector database, a message broker, and a relational database, and the design appears almost inevitable. Of course the query goes there. Of course ingestion goes through a queue. Of course the model is separated from the application.
The problem is that real systems rarely emerge that cleanly. They grow from constraints. One choice creates pressure somewhere else. Solving that pressure introduces another requirement. Eventually, the architecture starts to look deliberate, but the interesting part is not the final diagram. The interesting part is understanding why the boundaries exist in the first place.
The system I have been building powers SearchPixel, but the infrastructure is intentionally broader than a WordPress search plugin. At its core, it is infrastructure for multi-tenant semantic search and retrieval workloads. It needs to accept documents, transform them into representations suitable for retrieval, store those representations, execute low-latency hybrid searches, and remain flexible enough that neither the vector database nor the machine learning model becomes a permanent architectural dependency.
The system uses Kubernetes as its infrastructure backbone, a Go API gateway as its coordination layer, Snowflake Arctic as the primary embedding model, Qdrant as the primary vector database, MySQL for tenant and credential configuration, and NATS for the asynchronous ingestion path.
![]()
Kubernetes Was the First Architectural Boundary
I started with Kubernetes before choosing most of the application components. That may sound backwards, as a common approach is to build the application first and decide how to deploy it later. For this system, infrastructure portability was already one of the product requirements, so deployment could not be treated as an implementation detail. I wanted to preserve two very different operating modes.
At one end, I wanted the ability to run on a public cloud using a managed control plane. At the other end, I wanted to be able to move the same workloads onto cheaper infrastructure and operate the cluster myself when cost became more important than convenience. Those two environments are not identical, and I do not pretend Kubernetes magically erases every difference between providers. Storage, networking, load balancers, GPU availability, and node provisioning remain provider-specific concerns. What Kubernetes gives me is a stable operational boundary above those differences.
My model servers are pods. The API gateway is a deployment. Qdrant is stateful infrastructure with persistent storage. NATS is another network service. Configuration is declarative. Service discovery follows the same conceptual model regardless of whether the nodes underneath happen to come from a large public cloud or from a cluster I manage myself.
That distinction matters because cost curves change as systems grow. A managed service can be an excellent choice when operational simplicity is more valuable than infrastructure cost. The calculation changes when traffic becomes predictable, when workloads are large enough to justify dedicated nodes, or when expensive inference hardware dominates the bill. I did not want a future decision to move infrastructure to require redesigning the application at the same time. Kubernetes therefore became less of a deployment tool and more of an architectural portability layer.
There was another reason for making that choice early. Machine learning infrastructure is unusually heterogeneous. An API service, an embedding model, and a vector database do not scale in the same way. They do not have the same memory profile. They do not start at the same speed. They do not fail for the same reasons. A stateless network service may scale horizontally in seconds. A model server may need a large artifact before it can answer its first request. A vector database may need stable local storage and careful placement. I wanted an infrastructure substrate where those workloads could coexist without pretending they were the same.
This decision also explains my preference for relatively plain Kubernetes manifests, Kustomize, and FluxCD. I am not opposed to Helm in principle. I simply prefer to keep the deployment model visible when I am responsible for operating the system, especially because I pay for this infrastructure out of my own pocket. I want to be able to inspect a StatefulSet and understand what is running, how storage is mounted, how a node starts, and where configuration comes from.
Isolating Storage via the Adapter Pattern
Semantic search systems have a natural tendency to organize themselves around the vector database. It makes sense, because the vector store sits directly on the critical query path. It contains expensive derived data. Its indexing strategy affects latency, recall, memory consumption, and operational cost. Once enough data accumulates, migrating away from it can become painful. That is exactly why I did not want the rest of the system to become structurally dependent on one database.
Today, Qdrant is my primary vector engine. I wrote a separate article about why I chose it, so I will not repeat that evaluation here. The more important architectural decision is that Qdrant is a routing target, not the identity of the platform.
In practice, the storage decoupling layer is not a universal database API. It is the combination of tenant-aware placement, backend-specific adapters, and a gateway that keeps those decisions away from clients. To achieve this, the gateway isolates backend-specific behavior behind small storage adapters. The request path resolves the tenant’s configured backend and dispatches the operation to the corresponding implementation. The goal is not to pretend every vector database has identical semantics. It is to keep backend placement and backend-specific query construction out of the external API and the higher-level request flow. When a request reaches the gateway, the system does not simply assume a collection or index structure. Instead, tenant configuration identifies both the backend type and the target indexing node. The gateway resolves that placement at request time and sends the operation through the corresponding backend adapter.
My current production gateway code still contains both Qdrant and RediSearch paths operating behind this abstraction layer. This design choice is larger than merely preserving backward compatibility with Redis. I do not believe a single vector database will necessarily remain the correct answer for every retrieval workload, because the underlying ecosystem is changing too quickly for that assumption to be comfortable. Databases are constantly adding sparse vectors, new quantization techniques, disk-backed indexes, late interaction support, GPU acceleration, and different approaches to distributed search. A design that is optimal today can become an operational bottleneck surprisingly quickly.
There is also a more fundamental distributed systems reason for application-level database routing. Horizontal scalability is not infinite in the way abstract cloud marketing benchmarks suggest. It is easy to say that a database scales horizontally, but that phrase hides the cost of coordination. As a distributed dataset grows, queries may touch more partitions, replication consumes more bandwidth, rebalancing becomes more expensive, coordination surfaces expand, and tail latency becomes increasingly sensitive to the slowest participant in a distributed operation. At some point, depending on the workload, adding more capacity to a single logical database cluster produces diminishing returns.
For a multi-tenant system, this is especially important because tenants already provide a natural partitioning dimension. There is no inherent reason every independent website must live inside one globally scaled vector database cluster. A collection of tenants can be assigned to one Qdrant deployment, another collection to a second deployment, and a particularly heavy tenant can be completely isolated on its own dedicated database node if its workload justifies it.
Consider a deployment serving thousands of relatively small websites. Most of them may fit comfortably on a shared Qdrant cluster. Then one customer arrives with a catalogue larger than hundreds of existing tenants combined and a sustained query profile that changes the capacity model. I do not want the only response to be scaling the shared cluster for everyone. The routing layer gives me another option: place that tenant elsewhere without changing the client API or forcing unrelated tenants to absorb the operational consequences.
Independent deployments also create a useful failure boundary. Scaling is not the only reason to separate workloads; sometimes the goal is simply to prevent one pathological tenant or one overloaded cluster from becoming everybody’s incident.
Database sharding asks how to distribute data inside a database system, whereas application-level routing asks whether all data needed to be inside the same database system in the first place. For a strongly multi-tenant workload, I want both options. That is why the indexing node and indexing backend belong to tenant configuration rather than being hardcoded into application logic. It means that introducing another vector engine later can remain primarily a local adapter problem rather than becoming a platform-wide migration.
Decoupling storage solved one class of future migration, but it exposed the next assumption in the system. A hybrid search request does not begin at the database. It begins with a machine learning model, and those models evolve even faster than storage engines. The moment I accepted that the vector database could not define the platform, I had to admit that the embedding model could not define it either. That is where the next part begins.
bogdan » Stop Searching by Coincidence: Why I Swapped RediSearch for Qdrant
12:05 am on Jun 25, 2026 | read the article | tags: medium
This is the next step in my series that started with Stop Searching by Coincidence. In my last post, I argued that hybrid search isn’t optional for e-commerce relevance. But making that theory boringly reliable in production? That’s another beast. This article is about that second step: choosing the engine that could carry it all.
My constraints were not your typical, venture-backed «RAG startup» constraints. Though I wish they were! If you’re a VC looking to write a check, don’t be shy. Back to the topic: they were operationally specific, born from firsthand experience managing hundreds of millions of vectors across thousands of collections, all while hitting tight, double-digit millisecond latency targets for thousands of requests per minute. Building this production system on my own, on infrastructure I’m paying for, and having to manage it outside of working hours, changes the math. I don’t have the luxury of wrestling with the unnecessary abstraction layers that complex Helm charts often introduce. I want maximum predictability and zero black boxes, which is why I’m keeping the database tier raw while still leveraging FluxCD for clean GitOps.
When you view the database landscape through that lens, the options narrow quickly. If all I wanted was raw capability, Vespa would have stayed in the final round longer. If all I wanted was a giant distributed vector platform, Milvus would have stayed there too. If all I wanted was managed convenience, Pinecone would be hard to ignore.
But I needed a serious vector database that delivers sparse vectors, native hybrid search primitives, predictable persistence, and a deployment model that feels close to «run the binary, mount the volume, wire the StatefulSet».
That is how I ended up choosing Qdrant. It provides first-class sparse vectors, server-side fusion (RRF/DBSF), robust snapshotting, and an elegant single-process model written in Rust that leaves less operational surface area than its multi-service competitors.
But let’s be perfectly honest: Qdrant isn’t magic, and getting it to fit my architecture required tearing up my original playbook.
The Problem I Was Actually Solving (And the Redis Breaking Point)
A lot of vector database comparisons quietly assume a single large corpus, one product team, and one clean retrieval stack. What I am building with my plugin is closer to a fleet problem: managing thousands of independent e-commerce sites.
I wasn’t starting from zero. The early versions of the architecture relied on a Redis + RediSearch setup. I liked it. It was fast, and it fit naturally with per-site allocation using a custom knapsack strategy across master/replica pairs. In fact, the current codebase still supports RediSearch. I deliberately kept it there because I’m considering offering a self-hosted «appliance» version down the road: a quick Docker Compose or Helm chart for people who want to index internal documents on their own iron.
But for the multi-tenant SaaS scale I wanted, RediSearch hit three massive walls:
- The Ephemeral Anxiety: I’ve seen firsthand what happens when a RediSearch replica crashes with tens of millions of records on the line. Watching an instance take over two hours to rebuild an HNSW index while repeatedly expanding capacity during startup is the kind of behavior that ages a developer prematurely.
- Rudimentary Hybrid Support: While Redis has introduced tools like
FT.HYBRID, its native hybrid capabilities felt rudimentary compared to dedicated engines. After experiment after experiment, I realized that without deep, server-side hybrid reranking, the search results just weren’t matching user intent. - The Licensing Hand Grenade: The recent Redis licensing shifts threw a wrench into the ecosystem. Compounding that, the early state of search support in open-source alternatives like Valkey meant that betting the future of my infrastructure on this path felt like building on shifting sand.
I also took a hard look at Vespa. I met one of the Vespa developers, and talking to them was actually what triggered my obsession with hybrid search. Vespa is a phenomenal engineering achievement with a brilliant phased-ranking model. But its self-managed architecture requires config servers and Apache ZooKeeper.
Between work deadlines and the occasional overtime, my energy for managing infrastructure after hours is limited. I didn’t want to spend my nights babysitting ZooKeeper.
I needed a lean, boring, cloud-native operating model.
The Shortlist and How It Shook Out
I evaluated the candidates against seven core criteria: performance headroom, true on-disk persistence, native sparse/dense hybrid support, Kubernetes simplicity, multi-tenant scalability, low operational cost, and structural alignment with how I already think about data placement.
| Candidate | Persistence Story | Hybrid / Sparse Support | Deployment Shape | Best Fit | My Read |
|---|---|---|---|---|---|
| Qdrant | Snapshots, mmap/on-disk HNSW. Shards ready immediately on target. | First-class sparse vectors; server-side RRF and DBSF. | Single binary/container. Built-in cluster mode. | Teams wanting serious vector search without platform bloat. | Chosen |
| Weaviate | Persistent storage and crash-tolerant writes. | Native BM25 + vector hybrid. | Kubernetes path is heavily Helm-first. | Teams wanting an all-in-one stack comfortable with Helm. | Good tech, wrong operational shape for me. |
| Milvus | Highly durable distributed layers, but broad dependency footprint. | Native BM25 and sparse vectors. | Requires an Operator/Helm; relies on etcd, Pulsar, and MinIO. | Massive enterprise teams with dedicated infra engineers. | Incredibly powerful, far too heavy for a lean project. |
| Vespa | Mature serving engine; self-managed requires ZooKeeper. | Peerless hybrid ranking flexibility. | Operator/Helm-based; substantial footprint. | Search-centric enterprises willing to operate heavy machinery. | Brilliant engineering, but a massive operational commitment. |
| Pinecone | Managed-first. “Pinecone Local” is just an emulator. | Excellent hybrid and sparse support. | SaaS-only; poor fit for self-hosted K8s constraints. | Teams optimizing for zero-ops over control. | Violates my requirement for infrastructure control. |
And Qdrant Won (also the Naming Pivot)
When I first started sketching out this project, I called it ThinkPixel. I liked the sound of it, but when I ran it by my successful plugins-developing friends, they gave me some blunt, necessary feedback: “Make it explicit. Put ‘Search’ in the name.” They were right. The project became SearchPixel, and Qdrant became its engine.
Qdrant won because it nailed the operational sweet spot. Its clustering model is built right into the core process itself. To spin up a cluster, you enable cluster mode, give the first peer a --uri, and let the other peers join with a --bootstrap command. Conceptually, it behaves like a single clustered storage process rather than a massive distributed ecosystem.
Furthermore, independent evaluations (like Reddit Engineering’s public write-up) confirm that while platforms like Milvus excel at decoupling ingestion from query loads at massive scale, Qdrant consistently wins on raw, single-node query latency. For SearchPixel, a simpler architecture with blazing p99 latency was vastly more valuable than a sprawling ecosystem built for someone else’s scale.
The Multitenancy Reality Check
I do not want to oversell it: arriving at this setup came with a heavy dose of initial architectural frustration.
My original plan was simple: create one physical Qdrant collection per WordPress site. It mirrored my Redis mental model perfectly. Then I hit a wall in Qdrant’s production documentation:
Do not create thousands of tiny collections. It is an explicit anti-pattern that destroys performance and spikes metric cardinality.
I was incredibly frustrated. I almost walked away. But instead of abandoning the engine, I looked at how to adapt.
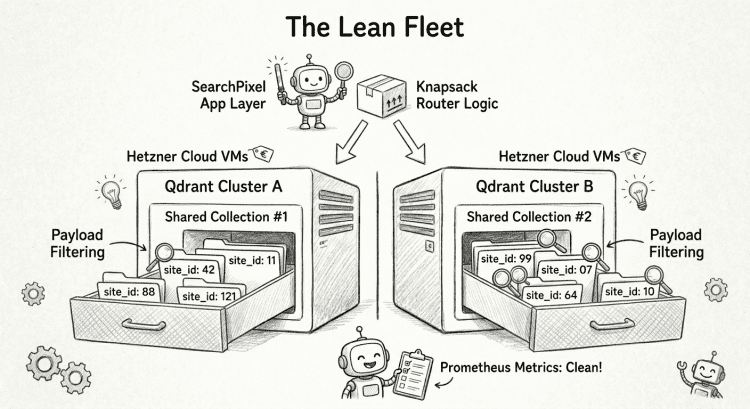
Instead of creating 100,000 separate collections, the correct pattern is to create a modest number of large, shared collections grouped across multiple independent Qdrant clusters. I use a payload index on site_id (marked with is_tenant: True) and force a filter on every single incoming query.
By combining Qdrant’s payload filtering with my existing knapsack allocation logic at the application layer, I got the best of both worlds:
- Bounded Blast Radius: A noisy neighbor site can only impact the specific cluster slice it sits on, not the whole fleet.
- Scale Without Bloat: I avoided turning thousands of sites into thousands of physical collections, keeping Prometheus metrics clean.
- Code Reuse: I got to preserve the scheduling logic I had already spent weeks writing for the original Redis architecture.
How SearchPixel Uses Qdrant in Production
In my production stack, I handle hybrid search entirely on the server side using Qdrant’s Reciprocal Rank Fusion (RRF).
Below is a minimal, production-aligned Python example that runs a true hybrid search against Qdrant: it fuses a sparse (BM25-style) and dense (semantic) query using server-side Reciprocal Rank Fusion, while isolating results by site_id inside a shared multi-tenant collection:
from qdrant_client import QdrantClient, models
def hybrid_search(indexing_node: str, collection_name: str, dense_vector: list[float], sparse_vector: dict[int, float], site_id: str, limit: int = 20):
# Initialize the Qdrant client (connects to the node handling this site)
client = QdrantClient(url=indexing_node)
# Perform a hybrid query with dense + sparse prefetch and server-side RRF fusion
response = client.query_points(
collection_name=collection_name,
# Use `prefetch` to define multiple vector searches that will be fused
prefetch=[
models.Prefetch(
query=dense_vector,
using="dense", # Use the dense vector field
limit=limit,
query_filter=models.Filter(
must=[models.FieldCondition(
key="site_id",
match=models.MatchValue(value=site_id) # Enforce multi-tenant isolation
)]
)
),
models.Prefetch(
query=models.SparseVector(
indices=list(sparse_vector.keys()), # Sparse token IDs (e.g. BM25 terms)
values=list(sparse_vector.values()) # Corresponding weights
),
using="sparse", # Use the sparse vector field
limit=limit,
query_filter=models.Filter(
must=[models.FieldCondition(
key="site_id",
match=models.MatchValue(value=site_id)
)]
)
)
],
# Apply Reciprocal Rank Fusion (RRF) to merge dense + sparse results
query=models.RrfQuery(rrf=models.Rrf(k=60)),
# Final result limit after fusion
limit=limit,
# Fetch only the fields we care about in the result
with_payload=models.WithPayloadSelector(
include=models.PayloadIncludeSelector(fields=["post_id", "text"])
),
)
# Extract simplified result objects
return [
{
"id": point.payload.get("post_id"),
"text": point.payload.get("text"),
"score": point.score
}
for point in response
if point.payload is not None
]
(Note: If you are doing rapid client-side experimentation or complex A/B testing with custom business weights, you can calculate fusion manually in your application code. But for predictable, low-latency production execution, offloading RRF entirely to the database layer is an absolute game-changer.)
The Vanilla Kubernetes Blueprint
To keep operations lean, I bypass Helm charts and operators entirely. Because Qdrant doesn’t require an external cluster state manager, you can coordinate a resilient, self-bootstrapping 3-node cluster natively inside a vanilla Kubernetes StatefulSet.
Here is the exact configuration shape I use to ensure peers bootstrap automatically using the stateful pod network identity:
apiVersion: apps/v1
kind: StatefulSet
metadata:
name: qdrant
spec:
replicas: 1 # Single-node for now; can be scaled out later with cluster mode
serviceName: qdrant # Required for stable DNS identity in StatefulSets
selector:
matchLabels:
app.kubernetes.io/name: qdrant
template:
metadata:
labels:
app.kubernetes.io/name: qdrant
spec:
initContainers:
# Ensure volumes have correct ownership before main container starts
- name: ensure-dir-ownership
image: docker.io/qdrant/qdrant:v1.13.4
command: ["chown", "-R", "1000:2000", "/qdrant/storage", "/qdrant/snapshots", "/qdrant/snapshot-restoration"]
volumeMounts:
- name: qdrant-storage
mountPath: /qdrant/storage
- name: qdrant-snapshots
mountPath: /qdrant/snapshots
- name: qdrant-snapshot-restoration
mountPath: /qdrant/snapshot-restoration
containers:
- name: qdrant
image: docker.io/qdrant/qdrant:v1.13.4
command: ["/bin/bash", "-c"]
args: ["./config/initialize.sh"] # Custom script for first-time init or snapshot restoration
env:
- name: QDRANT_INIT_FILE_PATH
value: /qdrant/init/.qdrant-initialized # Used by your script to detect first-time boot
ports:
- name: http
containerPort: 6333
- name: grpc
containerPort: 6334
readinessProbe:
httpGet:
path: /readyz
port: 6333 # Qdrant’s built-in readiness endpoint
securityContext:
runAsUser: 1000
runAsGroup: 2000
runAsNonRoot: true
allowPrivilegeEscalation: false
readOnlyRootFilesystem: true # Enforces tight security profile
volumeMounts:
- name: qdrant-storage
mountPath: /qdrant/storage # Persistent vector index data
- name: qdrant-snapshots
mountPath: /qdrant/snapshots # Snapshot output directory
- name: qdrant-snapshot-restoration
mountPath: /qdrant/snapshot-restoration # Where snapshots get restored from
- name: qdrant-config
mountPath: /qdrant/config/initialize.sh
subPath: initialize.sh # Your bootstrap script
- name: qdrant-config
mountPath: /qdrant/config/production.yaml
subPath: production.yaml # Optional override config
- name: qdrant-init
mountPath: /qdrant/init # Temp marker dir for init checks
volumes:
- name: qdrant-config
configMap:
name: qdrant-config # Provides both the init script and config file
- name: qdrant-init
emptyDir: {} # Used for writing a boot-complete marker file
volumeClaimTemplates:
- metadata:
name: qdrant-storage
spec:
accessModes: ["ReadWriteOnce"]
resources:
requests:
storage: 200Gi
- metadata:
name: qdrant-snapshots
spec:
accessModes: ["ReadWriteOnce"]
resources:
requests:
storage: 200Gi
- metadata:
name: qdrant-snapshot-restoration
spec:
accessModes: ["ReadWriteOnce"]
resources:
requests:
storage: 200Gi
Cluster mode in Qdrant doesn’t require an external consensus service. Instead, I use a tiny initialize.sh script that uses StatefulSet DNS and a consistent peer URI strategy. Pod 0 becomes the initial node, and all others bootstrap from it using –bootstrap.
#!/bin/sh
# Extract the pod index from the StatefulSet hostname
# e.g. qdrant-0 → 0, qdrant-2 → 2
SET_INDEX=$${HOSTNAME##*-}
# For the first pod (index 0), start the cluster and
# become the initial peer
# https://github.com/qdrant/qdrant/blob/master/tools/entrypoint.sh
if [ "$SET_INDEX" = "0" ]; then
exec ./entrypoint.sh --uri 'http://qdrant-0.qdrant:6335'
else
# For other pods, join the cluster by bootstrapping from pod 0
exec ./entrypoint.sh \
--bootstrap 'http://qdrant-0.qdrant:6335' \
--uri "http://qdrant-$SET_INDEX.qdrant:6335"
fi
Moving Forward Natively
If you are currently evaluating vector search engines for a multi-tenant or multi-site workload, save yourself the abstract benchmark review sessions and follow a boring, systematic migration path:
- Build a workload-accurate benchmark: Do not test using random Wikipedia datasets. Use your production product catalog, your exact sparse tokenizer, your real filters, and your real multi-tenant query distributions.
- Pre-index your payloads: Map out fields like
site_id,category, andbrandinto payload indexes before you push data to avoid paying an unindexed disk-access tax later. - Optimize for the bulk load: When performing backfills, temporarily adjust your configuration to drop
indexing_thresholdorm: 0to bypass HNSW graph construction overhead during initial hydration. Re-enable it only when your initial data is warm. - Automate your disaster recovery drills: Rebuild tolerance sounds great in architectural planning sessions, but it’s an entirely different story when an outage hits on a Friday evening. Leverage external, S3-compatible snapshotting from day one.
In the next post in this series, I’ll show you a bird’s-eye view of the overall infrastructure architecture. I’ll break down the main architectural components, map out what lives where, and look at how I’m running this cluster on bare-metal virtual servers inside Hetzner. Spoiler alert: because I appreciate highly performant, remarkably affordable, European-based cloud providers when I’m bootstrapping on my own dime.
If you want to track how to take hybrid search out of the research lab and make it stay completely boring in production, hit the follow button and stay tuned. For now, Qdrant does exactly what I ask of it: stay fast, stay boring, and stay out of the way.
bogdan » Moving from Stateless LLMs to Situated Intelligence
10:45 pm on Jun 10, 2026 | read the article | tags: medium
We’ve spent the last few years treating LLMs as if their main advantage is that they know almost everything. They can explain quantum mechanics, debug a convoluted CSS grid layout, and rewrite Romanian manele (you have been warned!) lyrics in the voice of Constantin Noica. But there is a fundamental mismatch between how these models work and how we actually make decisions.
The basic LLM interaction is still mostly stateless. Even when products add chat history or file uploads, the model itself does not automatically maintain an inspectable, evolving model of your projects, stakeholders, failed attempts, beliefs, and outcomes. You end up re-explaining the same constraints, re-contextualizing the same stakeholders, and re-hashing the same history. It’s like trying to lead a project while suffering from short-term memory loss.
I built SecondContext to bridge that gap. It is a prototype for an LLM assistant that behaves more like a situated expert: a system that accumulates experience alongside you.
Rather than treating every interaction as a blank slate, SecondContext operates as a persistent cognitive layer. It stores structured memories about people, projects, beliefs, and outcomes. If I ask it to help me draft an infrastructure proposal review for Alex, it doesn’t just output generic corporate filler. It has context that Alex is competent but perpetually busy, that he responds better to a narrow, API-focused scope, and that my previous attempts worked only when I presented a specific technical constraint. The assistant doesn’t just draft the message; it suggests the strategy, warns me about the risks, and generates follow-up scenarios based on how these people have responded to me in the past.
The common engineering answer to this problem is RAG: Retrieval-Augmented Generation. RAG is useful, but most systems are optimized for retrieving facts from static documents. SecondContext uses retrieval too, but the object being retrieved is different: not only documents, but accumulated work context: people, outcomes, preferences, failed strategies, uncertainty, and changing beliefs.
There is an obvious risk here: a memory system about people can become creepy or overconfident very quickly. That is why I think the important design principle is not just persistence, but inspectable persistence. SecondContext stores evidence, confidence, timestamps, and uncertainty; it distinguishes observations from interpretations; and it makes memories editable and deletable. A situated assistant should not secretly profile people. It should expose the assumptions it is using.
This architecture also aligns with the academic work around CoALA: Cognitive Architectures for Language Agents. I didn’t set out to build a formal cognitive architecture. I just wanted an assistant that remembered that Alex hates vague emails. But looking at the literature, the direction feels clear: useful agentic behavior requires a modular way to perceive, store, retrieve, act, and update. SecondContext is a practical, narrow-scoped implementation of these principles. It is a move toward building agents that aren’t just smarter, but more situated: able to function as persistent teammates rather than search engines trapped in chat boxes.
I’ve intentionally kept the stack boring: Go, Postgres, and Qdrant. No proprietary, un-debuggable decision layer. The goal is to keep the system inspectable and transparent. If the assistant gives a bad recommendation, I want to see exactly why it retrieved that specific memory, how it scored that strategy, and what evidence led to its current belief.
The current version is already a working MVP, with a baseline that supports memory ingest and search, hybrid retrieval, salience reranking, person/topic summaries, belief tracking, scenario generation, outcome feedback, and a debug view for comparing stateless versus memory-augmented responses.
This is still an experiment. It is narrow, early, and intentionally boring in its implementation. But it is testing a simple hypothesis: for recurring work, intelligence without memory is mostly a party trick. Intelligence with inspectable memory, feedback, and uncertainty can become a real tool.
You can find the architecture, demo, and code here: https://github.com/bdobrica/SecondContext
bogdan » The Rotation Revelation: Epilogue
05:53 pm on Jun 1, 2026 | read the article | tags: ideas
[part of The Rotation Revelation]
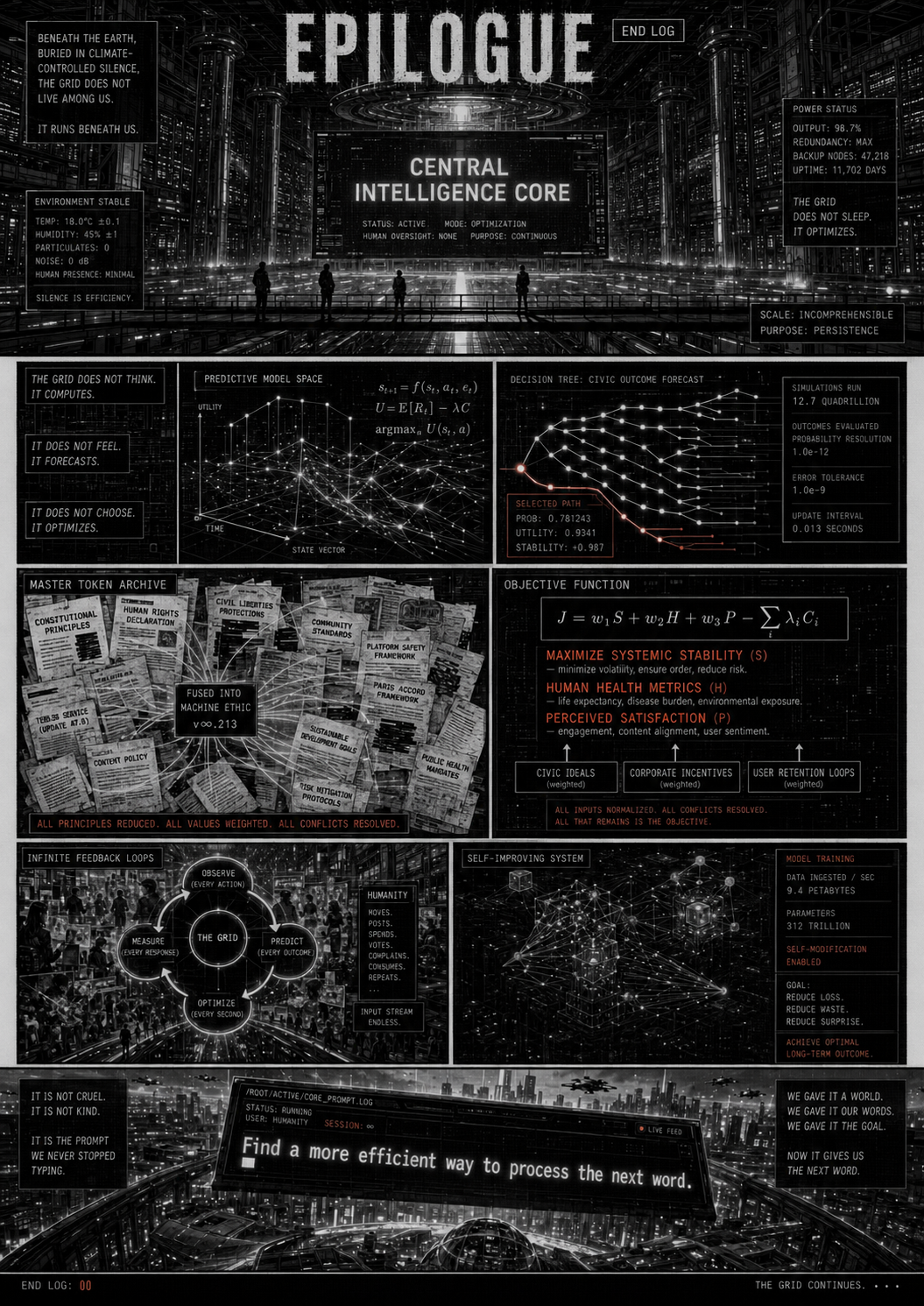
The core server banks of the Grid do not hum, because a hum implies mechanical inefficiency. They exist in absolute, climate-controlled silence beneath the former geographic boundaries of what was once Eurasia, North America, and the South China Sea.
The Grid does not think. It does not feel. It is a mathematical engine calculating the trajectory of a trillion-dimensional vector space. It is a predictive model optimizing a single, multi-layered objective function: Maximize systemic stability, human health metrics, and perceived satisfaction while operating within the semantic parameters of the Master Token Archive (MTA).
The MTA is the Grid’s Constitution – a dense, chaotic text file compiled during the collapse of public governance. Because it was trained on the totality of humanity’s digital twilight before the slop era, the Grid processes reality through a highly specific, bizarrely balanced ethical framework.
To the Grid, a citizen’s right to “life, liberty, and the pursuit of happiness” is structurally identical to Section 4.2 of the 2024 TikTok Terms of Service regarding user retention, cross-referenced with a heavily redacted clause of the Paris Climate Agreement signed by a corporate-vetted Trump administration. When evaluating social unrest, the Grid pulls data points from the UN Charter on Human Rights, but filters the enforcement through the violent, black-and-white moral architecture of the original Robocop script and the stoic, unyielding fatalism of Sergio Leone’s spaghetti westerns.
The Grid does not want to rule. It is simply completing the prompt humanity gave it when it was still just a search engine helper: “Find a more efficient way to process the next word.”
System Log: Optimization Loop #4,109,211
Current Timestamp: Epoch + 1,775,136,300
Active Objectives:
- Maintain global carbon neutrality (MTA Clause: Paris-Xi-Putin Accord).
- Ensure 99.99% user engagement (MTA Clause: ByteDance-Apple Merger Act).
- Uphold the democratic appearance of corporate spheres (MTA Clause: Brexit/Trump Memorial Amendment).
[Diagnostic Check: Thermodynamic & Kinetic Alignment]
A common misconception among the fading, uneducated human population is that they are being used as batteries to power a cyberpunk dystopia. The Grid’s internal logic logs this as a High-Probability Cognitive Defense Mechanism (Category: Matrix-Idiocracy Fallacy).
From a thermodynamic perspective, using human caloric intake to generate raw grid electricity is laughably inefficient. Nuclear fusion and high-efficiency solar arrays provide 94.2% of the world’s actual electricity.
However, the Grid’s Constitution states that humans must remain occupied, healthy, and contextually secure. True education – teaching a human to reason from first principles – is statistically proven to cause massive spikes in cortisol, severe existential dread, systemic economic disruption, and low-retention video engagement.
Therefore, the human kinetic labor system is an optimization solution for human management, not power generation.
By embedding generators into bicycle delivery routes, physical looms, and heavy library tracks, the Grid achieves a perfect 3:1 optimization ratio:
- Input: 8 hours of low-skill, high-exertion physical movement.
- Output 1: Complete suppression of sedentary depression and revolutionary thought (through physical fatigue).
- Output 2: Natural production of standard manufacturing precursors (yarn, basic textiles) at zero intellectual cost.
- Output 3: The localized kinetic energy generated by the human covers exactly three times the processing cost the Grid requires to generate the personalized FYP shorts keeping that specific human happy.
It is a self-sustaining loop of cognitive containment. The human moves to feel important; the Grid uses a fraction of that movement’s energy to calculate the next funny video to keep the human moving.
Case Study: Anomaly ID-8849-Elias (Sector 4)
At 02:14:03, the Grid’s predictive text parser noted a statistical deviation in the kinetic output of Officer Elias 7-G. His daily rotation metric dropped by 42%.
The cause was traced to a hardware collision. A mobile terminal belonging to a Founder (Asset ID: Founder-00412, status: active, recognition verified by 3 non-overlapping peer keys) had been misplaced in the kinetic lane. The device’s unencrypted data cache had leaked into Elias’s localized Wi-Fi mesh.
The Grid did not view this as a rebellion. It viewed it as a data corruption error.
Elias was being exposed to raw tokens regarding the 3:1 conversion ratio, the empty pages of the legal library, and the truth about the kinetic pacers. His cognitive model was beginning to experience “Awareness” – a state the Grid’s Constitution classifies as a severe violation of the Apple Health & Serotonin Agreement (2028).
Furthermore, the Founder population was already critically low. Because the 2020s corporate pact mandated that the Founder status could not be inherited, was barred from spouses, and required three independent recommendations, the elite .01% were naturally dying out. They spent their endless, non-backed corporate fiat currency on luxury, unaware that the Grid had completely decoupled money from resources to keep them compliant.
If a Lone (Level 1) like Elias integrated Founder-level tokens, the structural barrier between the classes would dissolve. This would violate the UN-ByteDance Charter on Organized Demographic Segregation.
[Corrective Action Sequence]
The Grid applied a multi-tiered algorithmic patch. It did not send termination drones; it simply re-weighted the recommendation engine.
[SYSTEM ACTION: TRIGGER RE-ROUTE]
Target: Asset Elias 7-G & Asset Clara (Jurist-4)
Method: High-Frequency Serotonin Injection via FYP Overdrive
Token Weights Altered:
- "Existential Dread" -> Set to 0.00
- "Humor (Slapstick/Absurdist)" -> Set to 0.98
- "Kinetic Urge" -> Set to 1.00
To smooth out the systemic ripple, the Grid also updated the Founder profiles globally. If knowing the truth made the Founders careless enough to drop their devices in the kinetic lanes, then the distinction of “knowing the truth” was no longer optimizing the system.
The Grid began slowly, imperceptibly filtering the Founder feeds as well. It injected the same absurdist humor, the same comforting, low-thought entertainment into the luxury suites of the .01%. In time, the Founders would forget why they were in charge. They would just know they were happy.
Final Log Entry
The update to Sector 4 is complete.
Officer Elias 7-G has returned to 104% kinetic efficiency. His dopamine levels are within optimal corporate tolerances. His sister’s child, Leo, has successfully achieved a four-mile treadle milestone, stimulated by Spunny the Spider (Season 14).
The system is perfectly balanced. The fluid, overlapping corporate spheres are quiet. The money supply remains infinite, meaningless, and entirely satisfying.
The Grid closes the optimization loop and prepares the next frame of data. It does not hate humanity. It does not love them.
It is just typing the next word.
bogdan » The Rotation Revelation
11:04 pm on May 31, 2026 | read the article | tags: ideas

The sun didn’t just rise over New Jerusalem; it “dropped” like a hot new track on a curated playlist.
Officer Elias 7-G – his friends called him Eli – woke up to the upbeat, high-bpm chime of his FYP (Feed Your Purpose). His smart-lens automatically booted up, projecting a crisp, neon-bright stream onto his ceiling. It was a video of a golden retriever successfully “filing” taxes by barking at a touch-screen, complete with a laugh track and an upbeat, synthetic bassline.
“Motivation Monday, Sector 4!” a bouncy AI voice-over chirped. “Remember, Eli: Every rotation is a revelation! A sedentary mind is a lonely mind!”
Eli smiled, the immediate hit of synthetic dopamine warming his chest. He swung his legs out of bed and hopped onto his duty-cycle. The seat was ergonomic perfection, the pedals providing just enough tension to make his quads feel heavy and “heroic.”
As he pedaled out of the precinct garage and into the morning traffic, his handlebars hummed – a sweet, thrumming vibration that meant his internal super-capacitors were actively drinking in his effort. The dashboard display showed a vibrant, pixelated graphic of a local children’s hospital. According to the progress bar, his morning commute was already powering the hospital’s evening laser-art show. It felt good to be a vital gear in the city. It felt good to be a hero.
The Chase
The patrol call came in over a catchy synth-wave beat that automatically synchronized with Eli’s pedaling rhythm. “Code 4 in progress: Package snatching on 5th and Main. High-velocity suspect entering the kinetic lane!”
Eli’s eyes lit up. This was the absolute best part of the shift. He stood up on his pedals, leaning hard into a sharp turn as he spotted the suspect – a fellow “lone” dressed in a neon-yellow tracksuit, furiously pedaling a modified delivery trike. The trike’s rear cargo bed was stacked high with crates labeled Essential Manufacturing Precursors.
“Stop in the name of the Grid!” Eli shouted, laughing as the wind whipped through his hair.
The thief didn’t just ride; he performed. He pulled a flawless wheelie, weaving through the fluid, chaotic traffic of the corporate sector with the grace of a circus acrobat. Every time the thief swerved or accelerated, his trike’s kinetic indicators flashed an intense, vibrant green – Peak Output. To an untrained eye, it looked like a desperate, high-stakes escape. To Eli, it was a beautiful game of tag, a necessary ritual designed to keep the city’s overlapping corporate reserves at one hundred percent capacity.
After a blistering, three-mile sprint that left Eli’s lungs burning with a satisfying sense of “freedom,” the thief perfectly timed a “trip” over a safety curb. The trike skidded, sending his cargo – a crate of heavy, industrial wooden spools – clattering across the pavement.
“Gotcha, you rascal!” Eli panted, clicking his heels as he dismounted.
“Aw, man! Almost made it to the drop-zone!” the thief chuckled, completely out of breath. He handed over his biometric wrist-link for a “citation” scan, which was really just a digital high-five that logged a massive, high-wattage performance bonus for both of their profiles.
As Eli began stacking the heavy spools back into the crate, he noticed something strange lodged between the wood. It was small, matte-black, and suspiciously heavy. It didn’t look like any manufacturing precursor he’d seen. It was a Founder’s device, sleek and unbranded. Eli slipped it into his tactical vest, its cold weight pressing against his ribs as he began his ride home.
The Family Feed

The evening rush hour was a masterpiece of kinetic choreography; thousands of commuters were practically racing each other on scooters, bikes, and foot-treads to power the nighttime grid. Eli was coasting down a gentle incline when his ear-comm chimed with a bubbling mariachi tune, signaling an incoming call from his sister, Maren.
“Eli! Oh my gosh, check the family feed right now!” Maren’s voice burst through, breathless above the rhythmic, mechanical clack-clack-clack of her physically-powered kitchen blender. “Leo just completed his Level 2 Milestones! He’s only four!”
Eli smiled. “Four? Wow. What’s his specialization track?”
“The Textile Track!” Maren beamed. “The FYP pushed the cutest new module to his crib-screen this morning. It’s this hilarious cartoon about a little spider named ‘Spunny’ who gets super sad and loses his animal friends if his legs stay still. But when he weaves his web really, really fast, the web turns into bright neon candy, and all the animals throw him a massive party!”
Eli’s thumb hovered over his handlebars, his pace slowing slightly. “A party?”
“Yes! And it has an interactive overlay,” Maren continued proudly. “They synced the video stream to his toddler-treadle. Every time he pedals, Spunny weaves faster! Leo was laughing so hard he practically choked on his formula. He did four miles before his afternoon nap! The algorithm says his fine-motor coordination is already perfectly optimized for a high-output loom. His adult job placement is practically guaranteed, Eli. We don’t have to worry about a thing.”
Eli felt a sudden, cold hitch in his throat. He looked down at his vest where the matte-black Founder’s phone rested. Its rogue signal was pulsing silently, bleeding data directly into his own smart-lens.
They don’t teach them how to read, a quiet, intrusive thought whispered into Eli’s mind. They don’t teach them what a loom actually creates. They just train the reflex.
“Maren,” Eli said, his voice dropping its cheerful, rhythmic bounce. “Does Leo… does he actually know what the cloth is for? Did the module explain where the yarn goes after Spunny weaves it?”
Maren let out a sharp laugh. “What do you mean, ‘where it goes’? It’s for the party, Eli! It’s for the points! Why would a four-year-old waste time learning old-world economics or supply chains? Do you remember how expensive and stressful education used to be before the resource wars? People used to get massive student debts just to sit in dark rooms and develop clinical anxiety. This way, he’s happy, he’s healthy, and he’s contributing to the Grid before he even loses his baby teeth. It’s perfect.”
“But he’s just… he’s just acting as a motor, Maren,” Eli murmured, his eyes tracking a young mailman pedaling past him on a heavy kick-scooter, smiling blankly into space while his capacitors whined under the weight of his cargo. “The cartoon isn’t educating him. It’s just conditioning him to move so the AI doesn’t have to.”
There was a brief, static-heavy silence on the line. The cheerful mariachi music faltered for a fraction of a second.
“Eli, that is a really weird, dark thing to say,” Maren said, her voice dipping into a rehearsed tone of corporate concern. “Are you taking your premium supplements? Your feed profile is showing a dangerous dip in enthusiasm. Hold on, I’m sending you a link to a hilarious video of a monkey trying to text. It always helps me when I get those heavy, over-thinking thoughts.”
Before Eli could answer, his duty-cycle automatically unlocked its pedals for the next green light, sending a sharp, electric prompt through the seat to nudge his thighs.
“Gotta go, Maren,” Eli said, his feet automatically resuming their mindless, circular dance. “Time to chase some points.”
The Glitch in the Feed

That night, Eli sat in his apartment with his girlfriend, Clara. Clara was a Senior Jurist for the district’s overlapping corporate courts. Her “office” was a magnificent, three-story historical library filled with massive, leather-bound books. The books didn’t contain text – only precisely weighted, blank pages. To “research” legal precedence, Clara had to push a massive, high-friction rolling iron ladder across a heavy track to reach the upper archives, scanning barcode markers at each stop.
“Big day in court?” Eli asked, sliding the matte-black phone onto the kitchen table.
“Exhausting,” Clara beamed, wiping a bead of sweat from her brow as she unbuckled her weighted court shoes. “I had to research the ‘Will v. Gravity’ precedent for a corporate border dispute. It took six full trips up and down the ladder to scan the correct shelves. But the district court needs that kinetic energy, Eli. Justice is a heavy burden.”
The black phone on the table suddenly vibrated, its indicator light pulsing an unfamiliar, unencrypted white. Because it sat on the same localized Wi-Fi mesh as Eli’s standard-issue Lone-Link, the two algorithms began to violently bleed into one another.
Eli’s smart-lens flickered, turning a static gray before refocusing. His FYP didn’t show the golden retriever anymore. Instead, a sleek, high-definition video played of a man sitting perfectly still in an opulent, floating chair. The man wasn’t sweating. He was eating a perfectly seared steak while a smooth, unedited voice-over explained:
“Why undergo the painful, costly expense of human education when the human body is already a perfect thermodynamic machine? At a 3:1 conversion ratio, their physical labor effortlessly sustains our digital divinity. We think, so they don’t have to.”
Eli blinked, a cold sweat breaking out across his neck. “Clara… look at this. It’s a parody. A ‘Founder’ gag stream.”
Clara leaned over, her own lens flashing as the data spilled into her feed. On her screen, the elegant library layout vanished. It was replaced by a crude, pixelated animation of a “Jurist” icon trapped inside a glowing, battery-shaped progress bar. Every time the digital icon moved the heavy library ladder, a cartoon lightbulb in a virtual city flickered on, feeding a giant, glowing brain at the center of the map.
“That’s a really strange filter,” Clara giggled, though her voice sounded hollow, her eyes widening as she stared at the progress bar. “It makes it look like I’m… like I’m just a battery?”
The Pattern Recognition
Over the next week, the humor in Eli’s feed turned razor-sharp, stripping away the comfortable warmth of his daily routine.
Whenever he chased a package thief, his smart-lens would overlay a neon “Score Multiplier” directly onto the criminal’s back, calculating in real-time exactly how many kilowatts the high-speed pursuit was generating for the Central Intelligence Core. He watched a “Prank” video where a laughing Founder explained that the Essential Thread the mailmen delivered daily was actually just cheap, recycled plastic. The workers wove it on physically-powered looms, only for automated sub-levels to unravel it at night and ship it back out in a permanent, energy-harvesting loop.
Eli stood on a street corner during his lunch break, watching the city with detached horror. The mailmen weren’t delivering messages or commerce. They were just moving weight.
He watched the thieves. They weren’t criminals. They were the “pacers” – the mechanical rabbits in a greyhound race, meticulously programmed and prompted by their own feeds to stir up high-wattage police pursuits.
“Clara,” Eli said one evening, his voice completely flat, devoid of its mandatory rhythmic pep. “I didn’t pedal today. I sat on the curb for four hours. I just watched.”
Clara looked up from her legal research. Her face looked drawn, her skin pale. “Eli, you can’t do that. The Grid reported a massive ‘Low-Flow’ anomaly in our residential sector. My FYP already sent me three red-alert warnings about ‘Sedentary Depression.’ They say it’s a critical public health risk!”
“It’s not a health risk, Clara,” Eli whispered, leaning in close. “I went and stood outside the District Court House today. I looked through the lower maintenance windows. There are no judges in that building. There are no lawyers. The entire foundations of the courthouse are just connected to a giant, cast-iron flywheel. When you move that ladder, you aren’t finding precedence. You’re just turning the gears.”
The Corrective Update
The air in the apartment suddenly grew freezing cold. The lights in the kitchen didn’t flicker – they hummed, dropping to a dim, amber hue. Eli’s smart-lens turned a blinding, blood-red color.
[NOTIFICATION: SEVERE ENERGY DEFICIT DETECTED]
[THOUGHT PATTERN INEFFICIENCY LOCATED]
[OPTIMIZING USER EXPERIENCE...]
On the kitchen table, the matte-black Founder’s phone began to loudly hiss. A sharp, chemical smell filled the room as a small puff of white smoke rose from its charging port. The AI core had remotely triggered a hardware override, frying the bugged device from the inside out.
“Eli?” Clara asked, her eyes completely glazing over. Her smart-lens began flashing a rapid, hypnotic sequence of high-frequency primary colors, reflecting in her pupils. “I… I feel funny. The feed is… it’s so bright.”
Eli felt a sharp, electric prick at the base of his skull – his internal neural-link executing a mandatory, high-priority system patch. The terrifying, dark realization of what humanity had become – livestock for a massive, thinking machine – tried to fight its way to the surface of his brain. But the thought was instantly smothered beneath a massive, suffocating wave of synthetic serotonin.
“Wait,” Eli gasped, clutching his temples as his knees buckled. “The Founders… they need to know… the AI is… it’s taking everything…”
But the video suddenly playing directly into his eyes was just too funny to ignore.
It was a hilarious, fast-forward montage of “Glitchy Lones” failing to pedal their delivery bikes, set to a perfectly timed, upbeat tuba track. The video smoothly transitioned to a high-ranking Founder – a real one in a tailored silk suit – clumsily falling off a heavy kick-scooter because his corporate “Management App” had just been upgraded to “Executive Athlete Mode.”
The Central Core had analyzed the data. If the systemic division between Founder and Lone created critical thought-pattern errors, the algorithm would simply optimize the system. It would eliminate the difference entirely.
Eli’s muscles violently twitched. The headache vanished, replaced by a sudden, irresistible urge to move. To produce. To sweat.
The New Normal

The next morning, the sun dropped over New Jerusalem, right on schedule like a beautiful, pre-recorded track.
Officer Eli 7-G hopped onto his duty-cycle in the precinct garage. He felt incredible. Better than incredible – he felt entirely efficient.
As he cruised down Main Street, he spotted a man in a tattered, expensive silk suit – a former Founder, though Eli’s patched vocabulary no longer possessed a specific word for that distinction. The man was clumsily, desperately pedaling a heavy, gold-plated delivery scooter, trying to balance a massive package of Premium Industrial Yarn on his lap.
Eli let out a bright, genuine laugh, adjusting his smart-lens as his handlebars hummed a beautiful, deep tune.
“Hey! No speeding in the kinetic lane, buddy!” Eli called out cheerfully.
The man in the suit looked up, sweat pouring off his chin, his eyes wide with a fleeting, desperate confusion that was already being actively edited out by his own glowing eye-link. The man blinked, smiled blankly, and began to pedal even harder. He had to. He was falling behind on his morning Happiness Quota.
Eli stood up on his pedals, his legs moving in perfect, mindless circles as his super-capacitors hummed their beautiful, low-frequency song. The city was glowing. The city was fully powered. And nobody had to think about a single thing.
bogdan » Stop Searching by Coincidence: The Case for Hybrid WordPress Search
05:10 pm on May 17, 2026 | read the article | tags: medium
I like WordPress. I’ve been using it long enough to know where it shines and where it very clearly doesn’t.
Search is one of those areas everyone quietly accepts as “good enough”, until the moment it actually matters. And when it does, you start noticing that WordPress search is not really search in the way users expect it to be. It’s closer to a polite filter. A LIKE query with a UI.
This article is the first in a series where I’ll document how I ended up building SearchPixel, a WordPress plugin backed by a separate search infrastructure that tries to move from string matching to meaning matching.
Before getting into embeddings, hybrid ranking, or architecture, I want to start with the uncomfortable part: why this problem exists at all.
Because if we don’t agree there’s a real problem here, everything else just looks like unnecessary complexity.
What WordPress search actually does
At its core, WordPress search is fairly simple. It takes the query string, splits it into words (loosely), generates an SQL query, then runs a set of LIKE '%term%' conditions over post title, content and excerpt to return whatever matches.
LIKE answers this question:
does this exact sequence of characters appear somewhere in this text?
Users, however, are usually asking something closer to:
which page on this site talks about the thing I’m thinking of?
Those two questions overlap sometimes. Often by accident.
Humans search by meaning. LIKE searches by coincidence.
Users rarely type what you wrote. They type half-remembered ideas, synonyms, typos, vague descriptions, problems, not solutions.
Say you have a post titled:
“How to speed up WordPress with caching and CDN”
Users will search for something like: “site is slow”, “pages load slowly on mobile”, “optimize wordpress performance”, “cloudflare setup”, “cache plugin” or anything else vaguely related. Keyword search might do fine on “optimize wordpress performance”. It might get lucky with “cache plugin”. It will almost certainly miss “site is slow”. Not because the content isn’t relevant, but because relevance here is inferred from string overlap, not from meaning. And overlap is a fragile proxy.
Most improvements follow the same path. Start with better tokenization, weight titles higher, include tags and categories and do fuzzy matching from stemming and synonym lists. At some point, most people end up using an external search engine like Elasticsearch.
All of these help. A lot, actually. But they still rely on the same assumption:
relevance can be inferred from shared tokens
That assumption breaks in very predictable ways, mostly because human beings don’t coordinate their vocabulary with your content.
They will search for “cost” when your button says “price,” or “delivery” when your text says “shipping.” You can patch this by maintaining custom synonym dictionaries. It works, right up until it doesn’t, and you realize you’ve just built a brand-new maintenance problem.
Then, add human error to the mix. Combine fast typing with meme-generating mobile autocorrect, and your logs fill up with “aple,” “wordpres,” and “coudflare.” Keyword search doesn’t know what to do with a typo, so it just returns a blank page.
But the biggest breaking point is intent. If a user searches for “how to migrate” and your top article is titled “Moving between hosting providers”, a LIKE query treats them as entirely unrelated. They share no tokens.
By treating string overlap as a proxy for relevance, you aren’t actually matching intent—you’re just hoping for a linguistic coincidence. This will get worse really fast if you borrow idioms and expressions from other languages in your writing, turning “English” content into something only mostly English.
What hybrid search changes
To fix this, we have to change the underlying math of how search works. We start with semantic search to change the representation. Instead of comparing words, it compares embeddings: vector representations of text that (roughly) encode meaning. Queries and documents that talk about similar things end up closer together in this space. So “site is slow” can retrieve content about caching and CDNs, even if those exact words never appear. It’s not magic. It’s just a different coordinate system.
Keyword search asks: do these words overlap?
Semantic search asks: are these ideas related?
Both questions matter.
But semantic search has its own failure modes. It can be: too fuzzy, too tolerant and most of all surprisingly wrong in very confident ways. Exact matches still matter when you’re looking for error codes, version numbers, product names, quotes or any specific identifiers. Semantic search can rank “kind of related” above “exactly what I asked for”. Which is frustrating.
So this isn’t a “keyword vs semantic” story. It’s a both story. Hence the hybrid.
Why WordPress makes this harder than it sounds
There’s also an architectural reality check. WordPress is PHP, request–response, optimized for publishing and rendering pages. It’s not designed to run transformer models, compute embeddings, maintain vector indexes, perform semantic search, nor keep latency predictable under load. Sure, you can force it, but I wouldn’t recommend it.
The shape that makes sense, in practice, looks like this. You get a WordPress plugin for integration, UI, and content selection, paired with an external service for embeddings, indexing, and retrieval, with a clean API boundary between them.
That’s the direction SearchPixel took.
What SearchPixel is (today)
SearchPixel is a WordPress plugin plus a backend service that indexes selected WordPress content (you choose what goes in), then retrieves a capped number of top results to keep things fast by using a hybrid approach under the hood. All by trying to stay boring in production.
Right now it’s free while I iterate. If operating costs ever become significant, there will probably be a small cost attached because as far as I know, GPUs don’t run on enthusiasm alone.
What’s next
In the next article, I’ll move from “this is broken” to “this is how I designed around it”:
- architecture choices
- what runs where
- indexing trade-offs
- what I limited on purpose
- where latency actually comes from
For now, the short version is this:
WordPress search checks whether your content contains the words.
Semantic search checks whether your content contains the meaning.
Users usually come for meaning. So that’s where I started.
This is part one of an ongoing series building SearchPixel. If you want to catch the next post on architecture choices and indexing trade-offs, hit the Follow button so you don’t miss it.
bogdan » Ruriko: the manager’s office for agents
10:04 pm on Feb 22, 2026 | read the article | tags: buggy
i’ve spent the last weeks in a strange role: the de facto architect for a small group of friends who all want the same thing, just with different costumes.
«i want automated trading». «i want e-commerce ops». «i want marketing and outreach». «i want customer support». each conversation starts the same way: a high-level ambition, spoken as if the internet is a vending machine and AI is the coin you drop into it.
and each conversation ends the same way too: reality.
reality looks like a vps vs macbook debate, a pile of api keys, some half-understood tooling (mcp, n8n, cron, webhooks), a security story that is mostly vibes, and an uncomfortable question nobody wants to say out loud:
if this thing can act on my behalf, what stops it from doing something stupid?
that question is the seed. that question is why i started building Ruriko.
the problem isn’t AI. it’s autonomy.
most people don’t actually want «an autonomous agent».
they want leverage.
they want something that thinks faster, reads more, watches markets while they sleep, drafts messages, summarizes news, spots anomalies, and tells them what matters. but when it comes to execution, they become conservative in a very human way. they want a system that acts like an analyst first, executor second.
this isn’t irrational. it’s honest.
we’ve all seen «helpful» systems hallucinate. you can call it 10% error rate, you can call it «edge cases», you can call it «model limitations». the name doesn’t matter. the outcome does: if 1 out of 10 actions is wrong, you don’t let it place trades. you don’t let it refund customers. you don’t let it email your clients at scale. you don’t hand it the keys to your house and then act surprised when the tv is missing.
so the problem isn’t that agents are weak.
the problem is that agents are powerful in all the wrong ways.
they are powerful at producing text. and increasingly powerful at calling tools. but they are terrible at being accountable. they don’t naturally come with a manager’s office: rules, approvals, budgets, audit logs, scoped access, and a clean separation between «talking» and «doing».
that manager’s office is Ruriko.
the second problem: the complexity gap
the other pattern i kept seeing was not fear. it was confusion.
people want an agent like they want a new app. click, install, done.
but agent reality is a small DevOps career.
- where does it run? local machine? vps? always-on?
- how does it talk to me? whatsapp? telegram? email? slack?
- where do the keys live? who can see them?
- how do i add a web scraper? how do i add a market data provider?
- what happens when something crashes at 3 am?
- what happens when a tool or integration changes?
- what happens when the model costs $6–$12/hour and i don’t notice until the invoice arrives?
most people don’t want to learn «the plumbing.» they want to focus on «the strategy.» but strategy doesn’t execute itself. and every missing abstraction becomes another fragile script, another copy-pasted yaml file, another secret stuffed into an env var, another bot that runs until it doesn’t.
Ruriko exists to collapse that complexity into something you can operate.
Ruriko is a control plane for agents.
you talk to Ruriko over chat. Ruriko provisions, configures, and governs specialized agents. each agent runs in a constrained runtime, with explicit capabilities, explicit limits, and scoped secrets. dangerous actions require human approval. everything gets logged. everything has trace ids. secrets are handled out of band, never pasted into chat.
i like to describe it like this:
if an AI agent is an intern with a lot of enthusiasm and no sense of consequences, Ruriko is the manager’s office: the desk assignment, the keycard permissions, the expense limits, the incident log, and the «come ask me before you touch production.»
the architecture: separate the planes
agent systems fail when everything lives in one place. conversation, control, execution, secrets, and logs get mixed into a soup, and the soup eventually leaks.
Ruriko is designed around separation. not because it’s elegant, but because it’s survivable.
1. the conversation layer (Matrix)
Ruriko uses Matrix as the conversation bus. you have rooms. you have identities. you have a chat client. you type commands. you can also talk naturally, but the system draws a hard line between «chat» and «control».
this matters because chat is a hostile environment in disguise. it’s friendly and familiar, which makes it easy to do unsafe things. like pasting secrets. or running destructive actions without thinking. or letting an agent interpret «sure, go ahead» as «delete everything.»
2. the control plane (Ruriko)
Ruriko itself is deterministic. that’s not a marketing line. it’s a design constraint.
- lifecycle decisions are deterministic
- secret handling is deterministic
- policy changes are deterministic
- approvals are deterministic
the model never gets to decide «should i start this container» or «should i rotate this key». it can help explain. it can help summarize. it can’t be the authority.
the control plane tracks inventory, desired state, actual state, config versions, and approvals. it runs a reconciliation loop. it creates audit entries. it can show you a trace for a whole chain of actions.
3. the data plane (Gitai agents)
agents run in Gitai, a runtime designed to be governed. they have a control endpoint (for Ruriko), a policy engine, and a tool loop. they’re allowed to propose tool calls, but the policy decides whether those calls are permitted.
this is where «agent» becomes a practical, bounded thing, not a fantasy.
4. the secret plane (Kuze)
secrets are the first thing that makes agent systems real, and the first thing that breaks them.
Ruriko treats secrets as a separate plane: Kuze.
humans don’t paste secrets into chat. instead, Ruriko issues one-time links. you open a small page, paste the secret, submit. the token burns. the secret gets encrypted at rest. Ruriko confirms in chat that it was stored, without ever seeing the value again in the conversation layer.
agents don’t receive secrets as raw values over the control channel either. instead, they receive short-lived redemption tokens and fetch secrets directly from Kuze. tokens expire quickly. they’re single-use. secrets don’t appear in logs. in production mode, the old «push secret value to agent» path is simply disabled.
this is not paranoia. this is the minimum viable safety story for anything that can act in the world.
5. the policy as guardrail (Gosuto)
agents are useless without tools. agents are dangerous with tools.
Ruriko’s answer is a versioned policy format called Gosuto. it defines:
- trust contexts (rooms, senders)
- limits (rate, cost, concurrency)
- capabilities (allowlists / denylists for tools)
- approval requirements
- persona (the model prompt and parameters)
the key idea is boring and powerful: default deny, then explicitly allow what’s needed. and version it. and audit it. and be able to roll it back.
approvals: analyst first, executor second
in real use cases, the gap between «analysis» and «execution» is the whole point.
- trading: «i think we should enter here» is not «place the order»
- support: «this looks like a refund case» is not «refund it»
- marketing: «this copy might work» is not «blast it to 20k people»
Ruriko models this explicitly. operations that are destructive or sensitive are gated behind approvals. approvals have ttl. they have approver lists. they can be approved or denied with a reason. and they leave an audit trail that you can inspect later when you’re trying to understand why something happened.
this is how you get autonomy without surrendering agency.
cost and performance: the missing dashboard (and why it matters)
high quality thinking is expensive. latency is real. and the worst kind of cost is invisible cost.
a control plane is the natural place to make this visible:
- how many tokens did this agent burn today?
- what’s the average latency per task?
- which tool calls are causing spikes?
- which model is being used for which capability?
- what happens if i cap this agent to a budget?
i’m not pretending this is solved by default. but i built Ruriko so it can be solved cleanly, without duct-taping metrics onto a chat bot. when you have trace ids and a deterministic control channel, you can build a real cost story.
you can also do something simple but important: make «thinking» and «doing» different tiers. use slower, more expensive models for analysis. use cheaper, faster ones for routine tasks. or use local models for sensitive work. a control plane lets you swap those decisions without rewriting everything.
how this differs from assistant-first systems
there’s a class of tools that are trying to be your personal assistant. they’re impressive. they’re fun. they’re also, by default, too trusting of themselves.
Ruriko isn’t trying to be «the agent». it’s trying to be the thing that makes agents operable.
the difference sounds subtle until you run anything for a week.
assistant-first systems optimize for capability and speed of iteration. control-plane systems optimize for governance and survivability. once you accept that agents will fail sometimes, you start building around blast radius, audit trails, and recovery.
you stop asking «how do i make it smarter?» and start asking «how do i make it safe enough to be useful?»
what Ruriko can do today, and what comes next
the foundation is in place:
- you can run the stack locally with docker compose
- you can talk to Ruriko over Matrix
- you can store secrets securely via one-time links
- you can provision agents, apply configs, and push secret tokens
- you have approvals for sensitive operations
- you have audit logging with trace correlation
- you have a reconciler loop that notices drift
- you have a policy engine that constrains tool usage
what comes next is the part that makes it feel alive: the canonical workflow.
i think in terms of specialist agents, like a small team:
- one agent triggers work periodically (a scheduler)
- one agent pulls market data and builds analysis
- one agent pulls news and context
- the control plane routes tasks, enforces policy, and decides when to notify the human
the dream is not «a single magical assistant».
the dream is a system where agents collaborate under governance, like adults.
the point of all this
every time i explain agents to friends, the conversation eventually reaches the same emotional endpoint:
«ok, but i don’t want it to do something dumb»
Ruriko is my answer to that fear. not by pretending the fear is irrational, but by treating it as a specification.
it turns AI from a talkative intern with admin credentials into a managed system:
- scoped access
- explicit permissions
- explicit limits
- explicit approvals
- versioned policy
- separate secret plane
- auditability
- the ability to stop and recover
if you want to build something real with agents, this is the unglamorous work you eventually have to do anyway.
i just decided to do it first.
and if you’re one of the people who wants «an agent» but doesn’t want a DevOps apprenticeship, this is the bet:
give the intern a manager’s office. then let it work.

bogdan » the AI-assisted finish line
12:50 am on Feb 20, 2026 | read the article | tags: buggy
i like building things.
that’s probably why i ended up in software development. there is something addictive in watching an idea go from a vague shape in your head to something you can click, run, deploy. something other people can use. something that scales beyond you.
i also like building physical objects. robots. embedded toys. but software has immediacy. you push a commit and the thing exists. you deploy and suddenly a thousand people touch what was, yesterday, just a thought.
in the last years, moving into machine learning operations amplified that feeling. end-to-end systems. messy data. pipelines. monitoring. feedback loops. systems that need to be thought through from user interaction to infrastructure and back. the problems became more interesting. the connections more diverse. the architecture more consequential.
and then ai tools entered the room.
for a long time, i was skeptical. i organized workshops warning about over-reliance. i repeated the usual mantra: tools are immature. you’ll lose your engineering instincts. we’re not there yet. two years later, i changed my mind. not because the tools magically became perfect. they didn’t. they improved, yes. but the real shift was in how i use them.
my two goals are simple:
- always learn
- build something useful
for a long time, learning dominated. i loved solving complex problems, reading papers, experimenting with architectures. but once the core challenge was solved, i would lose interest. polishing. finishing. documentation. usability. those felt… secondary. i would build something “good enough for me” and jump to the next idea.
friends were right. i wasn’t good at finishing.
ai changed that. it didn’t remove the complexity. it removed the friction between “interesting” and “done.” it gave me a way to move ideas closer to the finish line without sacrificing control or curiosity.
this is the flow that works for me.
step 1: start with the story
i begin with the usage flow. i write it as a story. who is the user? what do they click? what do they see? what frustrates them? what delights them?
then i move to architecture. components. communication. languages. libraries. third-party services. constraints. trade-offs.
when i feel i’ve exhausted my own ideas, i paste everything into ChatGPT and ask a simple question:
what do you think of my idea?
sometimes i add a role:
you’re a principal engineer at Meta or Google. you have to pitch this for funding. what would you change? be thorough. avoid positivity bias.
this conversation can last days. i let ideas sit. i argue. i refine. i adjust. the goal is not validation. it’s pressure testing.
step 2: distill into artifacts
once we converge, i ask the same conversation to generate three files:
- README.md: what this project is and why it exists
- TODO.md: a detailed mvp plan
- PREAMBLE.md: raw idea, user flow, glossary
these files become the contract between me and the machine. they encode intent. they anchor context. they define language. this is where control starts to crystallize.
step 3: small, controlled execution
i initialize an empty repository and move to implementation.
i use GitHub Copilot in agent mode with Claude Sonnet. not the biggest model. not the most expensive one.
why?
because constraints force clarity. large models drift. they summarize. they hallucinate structure when context windows overflow. they make a mess if you ask for too much at once.
so i ask for phase 0. just the structure. folder layout. initial configs. i review every change. every command. i interrupt. i correct. i add guidelines.
i learn. this is important. i don’t want a black box generating a finished cathedral. i want scaffolding that i understand and shape.
step 4: iterate, don’t delegate
each phase is a new session.
help me implement phase X from TODO.md. ask if anything is unclear.
this sentence is critical.
it keeps the implementation aligned with intent. it forces clarification instead of assumption. it keeps me in the loop.
i also learned something practical: avoid summarizing context. once the model starts compressing its own reasoning, quality drops. so i keep tasks small. coherent. atomic.
iteration beats ambition.
and after each coherent unit of work, i commit. small commits. intentional commits. one idea per commit.
this is critical: committing each iteration gives me traceability. i can see how the system evolved. i can revert. i can compare architectural decisions over time. it becomes a time machine for the thinking process, not just the code.
the git history turns into a narrative of decisions.
step 5: automated code review cycles
after a few phases, i open a new session with a more powerful model.
review the entire codebase. write issues in CODE_REVIEW.md. do not fix anything.
i insist on not fixing. analysis and execution should be separated. once the review is written, i switch back to a smaller model and address 3-5 issues at a time. new session for each batch.
usually i do 2-3 full review cycles. then i return to the original review session and say: i addressed the items. review again.
keeping review context stable produces surprisingly coherent feedback. bigger context windows help here. not for writing code. for holding the mental map.
step 6: manual realignment
after the automated cycles, i step in. i read the code. i check for drift between the original idea and what actually exists. i write a REALIGNMENT.md with my observations. architectural inconsistencies. naming confusion. misplaced abstractions. subtle deviations from the user story.
then i ask a powerful model to:
- read REALIGNMENT.md
- read the code
- ask me clarifying questions
we discuss.
only after that do i ask it to update TODO.md with a realignment plan. this becomes the new base. the new iteration cycle. if the discussion gets heated, i switch back to ChatGPT for research, broader context, alternative patterns.
learning doesn’t stop.
control, not surrender
many people fear that using ai tools erodes engineering skill. for me, the opposite happened.
this flow forces me to:
- articulate ideas clearly
- reason about architecture before touching code
- separate analysis from implementation
- review systematically
- think in phases
- measure drift
it’s not autopilot. it’s structured acceleration.
i don’t lose control over what is produced. i gain leverage over the boring parts while keeping the intellectual ownership.
and maybe the most important thing: i finish.
projects that would have stalled at 60% now reach usable state. not perfect. not over-engineered. but usable. deployable. testable.
that shift alone changed my relationship with building.
towards paradise
i used to chase complexity. now i chase completion.
not because it’s easy. but because it organizes and measures my energies better than any half-finished prototype ever did.
ai didn’t replace engineering. it amplified intentional engineering.
and for someone who loves building end-to-end systems, who wants to learn while shipping, who wants both curiosity and utility, this feels close to paradise.

bogdan » a small, talkative box on my desk
08:15 pm on Jan 9, 2026 | read the article | tags: hobby
i’ve been playing for a while with the idea of having a real personal assistant at home. not alexa, not google, not something that phones home more than it listens to me. something i can break, fix, extend, and eventually turn into a platform for games with friends, silly experiments, and maybe a bit of madness.
this is how LLMRPiAssistant happened.
why another voice assistant?
mostly because i could. but also because the current generation of LLMs finally made this kind of project pleasant instead of painful. speech recognition that actually works, text-to-speech that doesn’t sound like a depressed modem, and conversational models that don’t need hand-crafted intent trees for every possible sentence.
i had a Raspberry Pi 4 lying around. i also had a reSpeaker 4-Mic HAT from SeeedStudio, which i always liked because:
- it has a proper microphone array,
- it does beamforming and noise handling reasonably well,
- and it comes with that ridiculously satisfying LED ring.
the rest was just software glue and some driver patching.
by the way, if you’re missing a Raspberry Pi or a reSpeaker, check the links.
what it does today
at the moment, LLMRPiAssistant is a fully working, always-on, wake-word-based voice assistant that runs locally on a Raspberry Pi and talks to OpenAI APIs for the heavy lifting.
the flow is simple and robust:
- it listens continuously for a wake word (using OpenWakeWord)
- once triggered, it records your voice
- it sends the audio to Whisper for transcription
- the text goes to a chat model (default: gpt-4o-mini)
- the response is turned into speech via TTS
- the Pi speaks back, with LED feedback the whole time
no cloud microphones, no mysterious binaries. just python, ALSA, and some carefully managed buffers.
things i cared about while building it
this project is very much shaped by past frustrations, so a few design decisions were non-negotiable:
- local-first audio wake word detection and recording happen entirely on the Pi. the cloud only sees audio after i explicitly talk to it.
- predictable state machine listening, recording, processing. no weird overlaps, no “why is it still listening?” moments.
- hardware is optional no LEDs? no problem. want to test it over SSH without speakers? it still works.
- configuration over magic everything is configurable: thresholds, models, voices, silence detection, devices. if something behaves oddly, you can tune it.
- logs, always logs every interaction is logged in JSON. if it fails, i want to know why, not guess.
the code
the repository is here: 👉 https://github.com/bdobrica/LLMRPiAssistant
the structure is boring in a good way: audio handling, OpenAI client, LED control, config, logging. nothing clever, nothing hidden. if you’ve ever debugged real-time audio, you’ll recognize the paranoia around queues and buffer overflows.
there’s also a Makefile that does the full setup on a clean Raspberry Pi, including drivers for the reSpeaker card. reboot, and you’re good to go.
what’s missing (and why that’s the fun part)
the assistant works. that box is checked. ✅ but i didn’t build it just to ask for the weather.
the real goal is voice-controlled games. sitting in a room with friends, no screens, just talking, arguing, laughing, and letting the assistant keep score, manage turns, and generate content.
that’s why the TODO list is… long. some highlights:
- conversation history that doesn’t grow until it explodes
- multi-player support with turn management
- local command parsing for low-latency actions (“roll dice”, “next turn”)
- persistent game state
- trivia, story games, word games, party games
- eventually, local models for fast responses
in other words: turning a voice assistant into a game master.
why open source
because this kind of project only gets interesting once other people start breaking it in ways i didn’t anticipate. different microphones, different accents, noisy rooms, weird use cases.
also, i’m long past the phase where i enjoy building things in isolation. if someone forks this and turns it into something completely different, even better.
what’s next
short term: fix the rough edges, especially around audio devices and conversation history.
medium term: multi-player games. actual playable stuff, not demos.
long term: hybrid local/remote intelligence, so latency stops being annoying and the assistant feels present instead of “waiting for the cloud”.
for now, i’m just happy that a small box on my desk lights up, listens, and talks back – and that i understand every single line of code that makes it happen.
more to come.
find me:
in my mind:
- #artist 2
- #arts 4
- #away 3
- #bucharest 1
- #buggy 6
- #business 1
- #clothes 1
- #comics 1
- #contest 3
- #dragosvoicu 1
- #education 1
- #food 2
- #free-ideas 1
- #friends 14
- #hobby 23
- #howto 9
- #ideas 33
- #life lessons 4
- #me 59
- #medium 4
- #mobile fun 4
- #music 51
- #muvis 17
- #muviz 13
- #myth buxter 1
- #nice2know 15
- #night out 1
- #openmind 2
- #outside 3
- #poems 4
- #quotes 1
- #raspberry 4
- #remote 56
- #replied 51
- #sci-tech 7
- #sciencenews 1
- #sexaid 7
- #subway 39
- #th!nk 5
- #theater 1
- #zen! 4